
Controlling your breath with polariographic oxygen sensors in 1968
This article, written by Walter Starck, was made possible thanks to the cooperation of Mr R. Bakker and with photos by Sharon Readey. I would like to thank them very much for that. Any additional information about this unique first ECCR is welcome. Enjoy the read.
THE DESIGN OF THE ELECTROLUNG
BY
Walter Starck
July 1998

1. Sensors
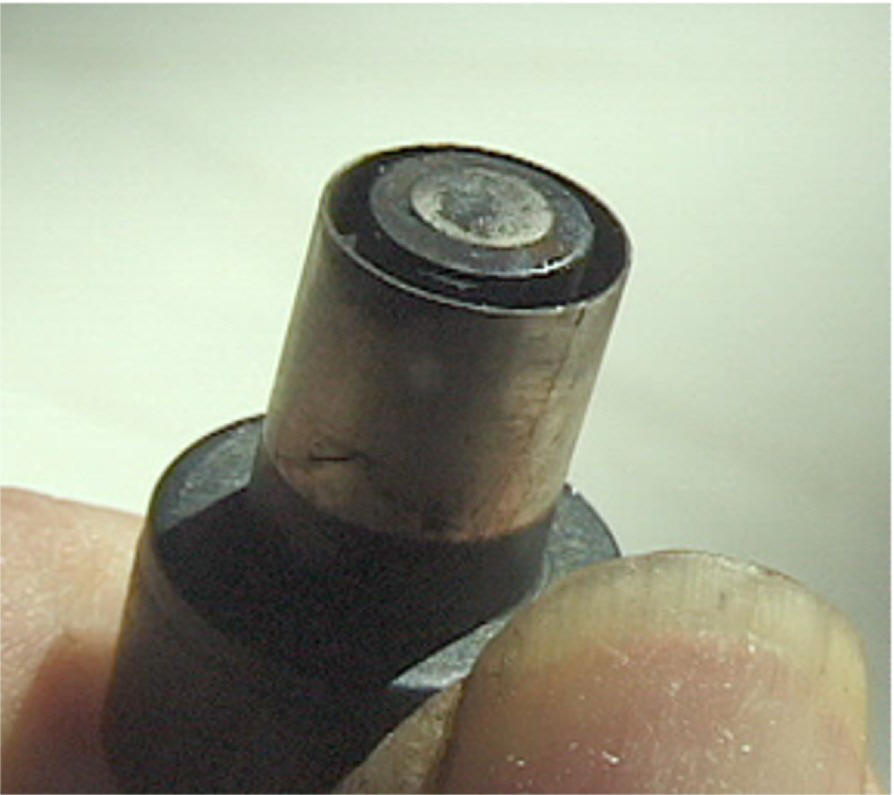
The Electrolung used three polariographic oxygen sensors. The sensors were robust handmade ones we made ourselves. They had a central platinum cathode about 1/4″ in diameter surrounded by a concentric silver anode about 3/8″ Diameter. In between was an annular groove for the KOH electrolyte. A .001″ teflon membrane held in place by a thick silicone rubber boot retained the electrolyte. Although the sensors would run for weeks before desiccation of the electrolyte became limiting our SOP was to make them up fresh and calibrate them for each days diving. At the end of the days diving the membranes would be removed and the sensors washed with distilled water. Making up and washing off the sensors only took a few minutes and assured you always had fresh sensors.

Sensors of this type don’t wear out so they were hard wired into the circuit. Unlike galvanic sensors they don’t use oxygen but rather just respond to its presence. They work equally well submerged so the effect of any condensation is negligible. A drop of water fully covering the end of the sensor would only slow the response time. It practice we never had any condensation in the sensor area as this came immediately after the canister so the gas was at its warmest and driest point in the circuit. Thick plastic walls probably helped too in avoiding condensation on cold surfaces.
The chief advantages of the sensors were that they were always fresh and condensation wasn’t a worry. The disadvantage is that in making them up with fresh electrolyte you can screw up by contaminating the sensor via sloppy technique. Any significant change in calibration after a fresh make up would be an indicator and determining why should be mandatory before proceeding further. Still, there are the black box mentalities who will simply crank the trim pots until they get the reading they want and then assume all is well.
There were two trim pots for calibrating each sensor. One for zero, the other for gain. Zero was checked each time before the sensors were made up. Gain was calibrated initially with air then the unit was put together and a check with pure O2 was done. The permeability of Teflon to O2 varies with temperature. The sensors were of potted epoxy construction with the electrodes embedded in the epoxy. A thermistor in contact with the
underside of the cathode was also embedded. This thermistor had a similar response curve to the teflon and compensated for the temperature effect keeping output linear over the desired range. Our chosen set point was 0.5 Atm PPO2. The bottom line was that with proper care the sensors were very reliable. Enough so, that they could be hard wired in and I know of no case where one ever had to be replaced.
2. Electroncs: Control, Readout and Alarm
Unlike galvanic sensors, polariographic electrodes don’t generate electricity. Rather, the conductivity of the cell varies in the presence of oxygen. A bias potential from an external source is applied between anode and cathode and the resulting flow of current is a function of the molecular concentration of oxygen present. The current involved is very small so an Op Amp is used with each sensor to boost power to a level useful for control and monitoring. Hermetically sealed trim pots which incorporate an O-ring seal around the adjustment screw provide for zero and gain adjustment of each Op Amp thus enabling calibration.
The amplified signal is read out to a wrist display, consisting of a stack of three edgewise panel meters. 100 microamp meters were used in conjunction with high resistance to prevent a possible short in this circuit from affecting the solenoid control. Mil Spec, so-called “shock resistant” meters were used. These resist minor bumps but still they won’t stand up if you drop the display on a steel deck or concrete. In practice it wasn’t a significant problem but occasionally a meter did require replacement. This was quick and easy to do.

The big advantage of this type of analog display is, that you can tell at a glance everything you need to know. In use all you need to verify is that all of the readouts are in line with one another and at or a bit above the set point which was exactly mid scale. This kind of meter is also precise enough for calibration purposes. If I were doing it today I would look at bar type LCD or LED readouts for monitoring and perhaps a separate switchable numeric display for calibration. I would also seriously consider a miniature head up display in the mask instead of one on the wrist. I don’t like numeric displays for monitoring as they entail reading and mentally comparing numbers which requires much more attention than just noticing if position and alignment are where they should be. Possibly some of the commercial RBs have already done all this.
The amplified signals from all three sensors were fed into a fourth Op Amp which in effect averaged them and used the resulting value to control the solenoid set point via a switching transistor. We used a fixed set point of 0.5 Atm PPO2 but it would be simple to add a trim pot to provide an adjustable set point. Clipping circuitry limited the input to the control Op Amp from each sensor to values corresponding to 0.25 and 0.75 Atm PPO2. If any one sensor began to read drastically different from the others its effect on automatic solenoid control was thus limited. Clipping came after the meter display thus they would continue to read true output even if the input to the control Op Amp was clipped. Clipping also activated an audible alarm. If the alarm sounded a glance at the meters would tell you what the situation was. If only one was off the other two would continue to exercise control. If all were high, low or different from one another you could use manual control while aborting the dive.
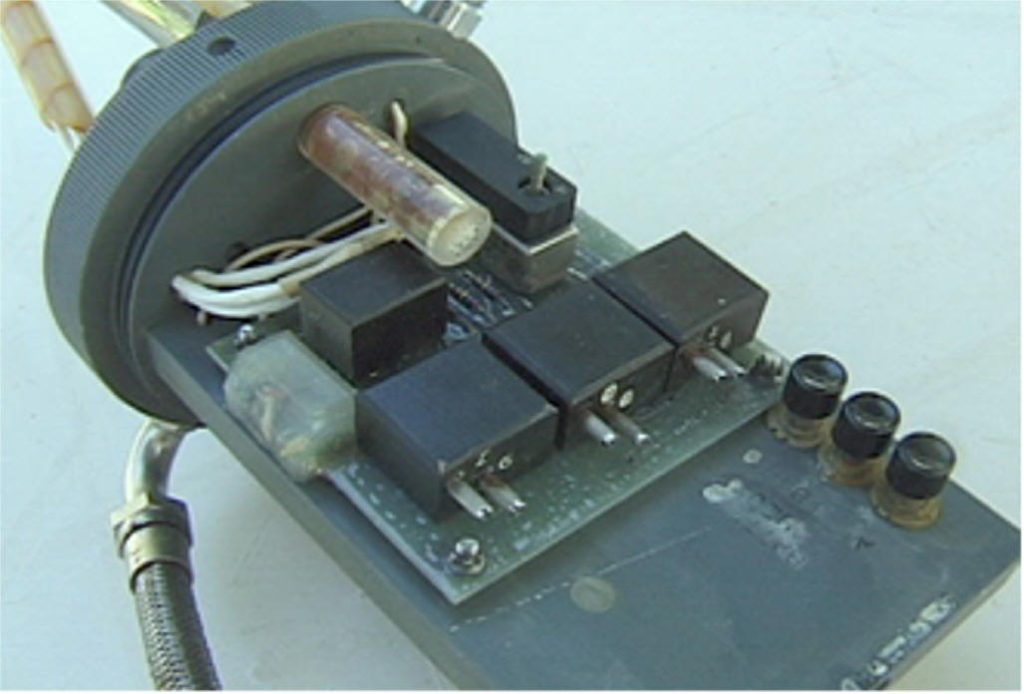
The Op Amps require a + and a – voltage power supply. This was supplied by a pair of 9V Manganese Alkaline transistor radio batteries. Bias to the sensors was provided from the same source via a voltage dividing resistor circuit. A second pair of the same batteries provided switchable backup power. A third pair used in parallel provided separate power for the solenoid. The solenoid did not have backup as this is non-critical because manual control of O2 is easily effected. The snap terminals used for this type of battery were securely attached to a bulkhead. A screw adjusted base plate held the batteries firmly in place and against the terminals avoiding any possibility of a loose battery connection. All the electronics were incorporated on a single circuit board about 4×5″. This was mounted on one side of a longitudinal bulkhead in the electronics housing with the batteries and audible alarm on the other. This longitudinal bulkhead was itself mounted on a transverse bulkhead which separated the electronics compartment from a plenum above the absorbent canister. The solenoid and sensors were mounted on the opposite side of this transverse bulkhead thus everything electrical other than the wrist display was immediately adjacent to each other.
In the units I made all of the electronic components were on a printed circuit board. After assembly the boards were coated with a spray-on waterproofing compound as is widely used for marine electronics. At Beckman the components were assembled into 4 micro- welded epoxy potted modules which plugged into gold plated sockets on the circuit board. In theory this is a better way to go but in practice it didn’t make any noticeable difference.
With respect to reliability of electronics in this kind of application. Recently someone posed the question of when was the last time your TV failed to which Robert made the wonderful reply, “The last time I took the bastard underwater.” Both comments reflect important points. Electronics in themselves can be extremely reliable. In terms of MTBF, far more reliable than most mechanical devices. Enough so that they can be trusted for things like passenger aircraft control systems where thousands of systems are in everyday use and a single failure means the loss of hundred of lives. But Robert is right too. If you flood them with water they fail. The problem then is really a mechanical one. Can electronics be reliably enclosed so as to prevent flooding in underwater use. If it were solely a matter of constructing a watertight pressure proof housing for the electronics that alone wouldn’t be too hard. Unfortunately there is also the matter of connections for sensors, displays, a solenoid, and a switch plus keeping all these external devices themselves dry. The possibilities for leaks begins to multiply. With a great deal of care in construction and use, high reliability is achievable but I think there is a much easier way to reliably keep out the water.

The key to the solution is pressure. Keeping things watertight under 100-200 psi is difficult. Doing it under 0.5-1 psi is easy. In the Electrolung everything was at ambient pressure. The electronics compartment was vented via a small canister of silicagel with the rest of the system. A standpipe for the vent orifice prevented any accumulated moisture in the canister plenum from being pushed into the electronics compartment. In anything but a head down position the electronics were above the counterlung thus any leak would normally result in gas escaping rather than water coming in. In practice with the kinds of seals involved and the very low pressure differentials leakage anywhere in the electronics section was never a problem.
Gas supply
Two, 9 cf., 2100 psi steel gas cylinders were used for O2 and inert gas. These were lightweight models FAA certified for use in aircraft. Initially we used chrome plating to protect them, later we went to teflon coating. Beckman liked the more military look and there was some concern over possible hydrogen embrittlement from the chroming process.
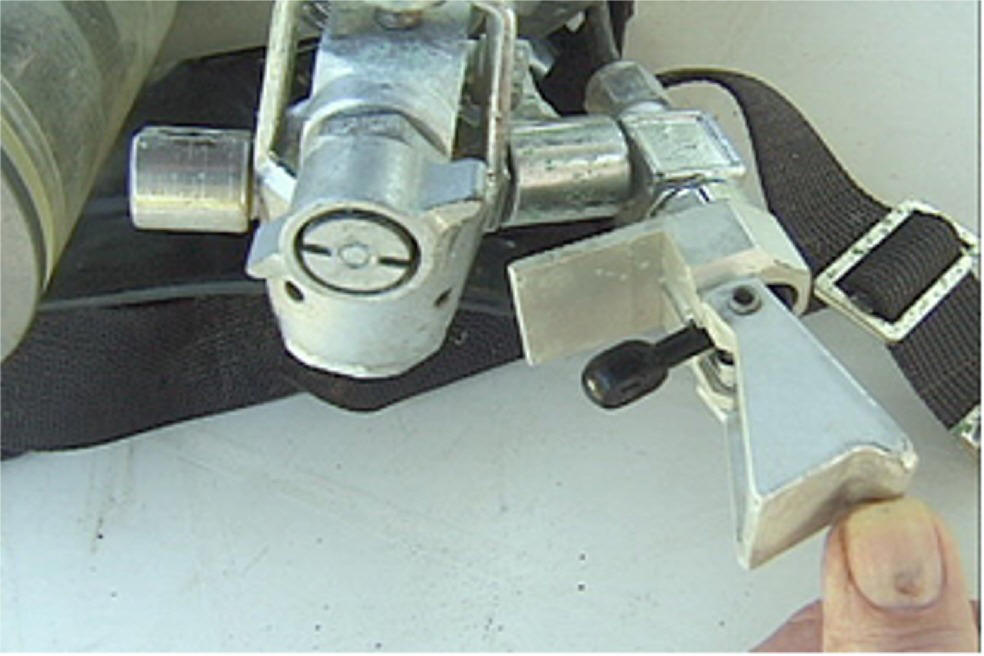
Standard, old style, “K” valves were used as cylinder valves. On the inert side a SCUBA regulator-type yoke was used to mount a high pressure 1/8″ NPT needle valve operated by rotary action of a T-shaped handle. Inert gas was valved in manually directly from the tank as needed using this valve. In use it had a very smooth precise feel. Inert gas was valved into the plenum at the bottom of the absorbent canister so that some mixing would take place before it got to the sensors.
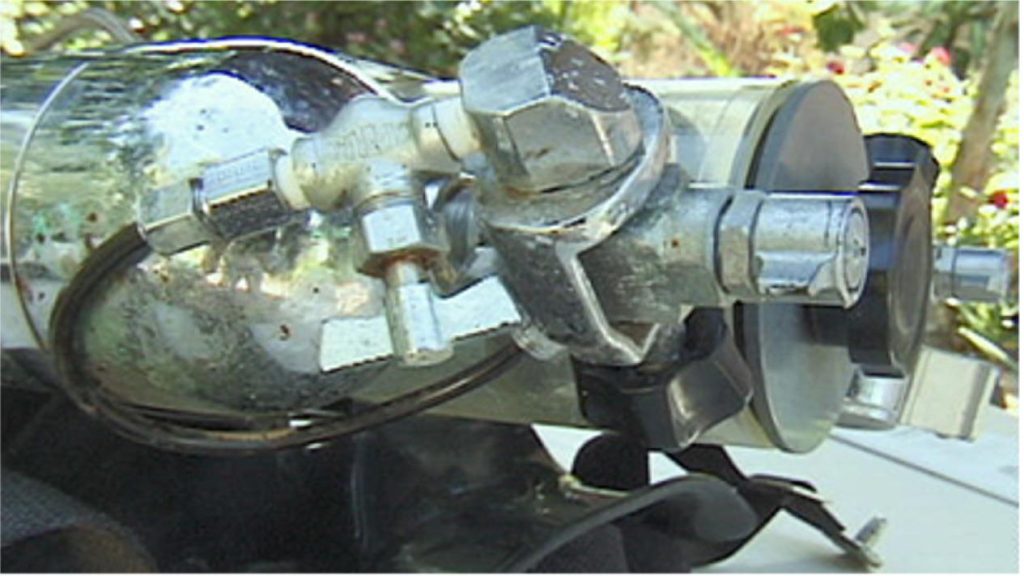
On the O2 side a piston type first stage of a U.S. Divers single hose regulator was used to reduce tank pressure to about 60 psi. This is somewhat lower than such first stages normally deliver and was achieved by using a weaker piston spring. The normal hose to the second stage was used to connect the O2 supply to the solenoid valve. The octopus port of the first stage was used to attach an O2 bypass valve. This was a spring action, lever activated low pressure valve and it was protected by an enclosure which required opening a spring closed cover to get at the valve. The manual bypass valved O2 directly into the sensor compartment so the result was immediately readable.
I will digress briefly on O2. In addition to the physiological risks recently discussed in some detail on the list there is also the danger of fire and explosion. Valves, regulators, fittings and any other equipment used for O2 have to be thoroughly degreased of any petroleum based lubricants. If lubrication is required, as for example with the o-ring seal
of a regulator piston, non-combustible silicone based lubricants must be used. Be aware that even a fingerprint oily with suntan lotion can start an explosive fire with O2. Once an O2 fire starts all sorts of things you might not ordinarily think of as combustible burn ferociously. I have heard stories of chamber fires in which everything inside, including the occupants, was reduced to ash.
My partner Kanwisher was on one of the advisory panels to NASA in connection with the Apollo program. Although he recommended using a mixed gas atmosphere in the Apollo capsule he was over-ridden by the engineers who felt that monitoring the PPO2 was too difficult. John knew better as he had been doing it for several years in conjunction with his work on respiration but the engineers prevailed. The result was the fire which killed three astronauts.
The solenoid valve we used was a miniature 12 volt one made for pneumatic control. We equipped it with a miniature screw adjusted needle valve outlet. When the setpoint is reached and the solenoid is triggered it takes perhaps three or four seconds for the sensors to respond and rise enough to cut it off again. The solenoid needle valve was adjusted so that the O2 injected raised the PPO2 to a peak pulse of about 0.75 Atm and would usually
trigger a couple of beeps from the audible alarm. Within a couple of breaths mixing brought the level back to perhaps 0.65 after which it dropped more slowly as it was consumed by metabolism until the setpoint was reached again after about a minute or so. That would be for moderate activity such as easy swimming. At complete rest it would of course take longer to drop back to the set point and less time if you were actively swimming.
If the needle valve was adjusted to a lower flow rate solenoid activation would be more frequent and of longer duration placing an unnecessary drain on the solenoid batteries. If much higher flow was adjusted for the O2 spikes would be too high and the alarm would be sounding much of the time.
I think there are now smaller, more power efficient solenoid valves available.
The solenoid and manual bypass valves were of the downstream type so that if high pressure leakage from the regulator occurred it would release when it reached the level where it overcame the spring tension which normally closed the valve. This is important to prevent either valve lockup or blowing out the supply hose in the event of a high pressure leak. In the event of O2 leakage from either valve the cylinder valve could be used to cut it off.
The gas cylinders were mounted on either side of the central larger cylinder containing the absorbent canister and electronics section. This assembly was worn as a back pack with the valves at the bottom at hip level. Inert gas had to be added several times on descent and at other times if you lost any from nasal exhalation. Manual O2 was normally only used in decompression. The inert gas valve was therefore on the divers left side leaving the right hand free for more complex tasks. Swapping sides for southpaws would have been easy but I don’t recall anyone ever raising the question. It was no big thing either way.
4. The breathing circuit: Mouthpiece, hoses, counterlung and canister
The Electrolung mouthpiece was originally constructed of PVC. The main body of the mouthpiece assembly was made in three parts fuse glued with PVC solvent cement. At Beckman this part was manufactured as a teflon coated aluminium investment casting which made a nicer looking part. A rotating drum type valve operated by a small lever permitted closure of the mouthpiece if you wanted to take it out of the mouth underwater. Two check valves directed gas flow to the proper hoses for inhale and exhale cycles.
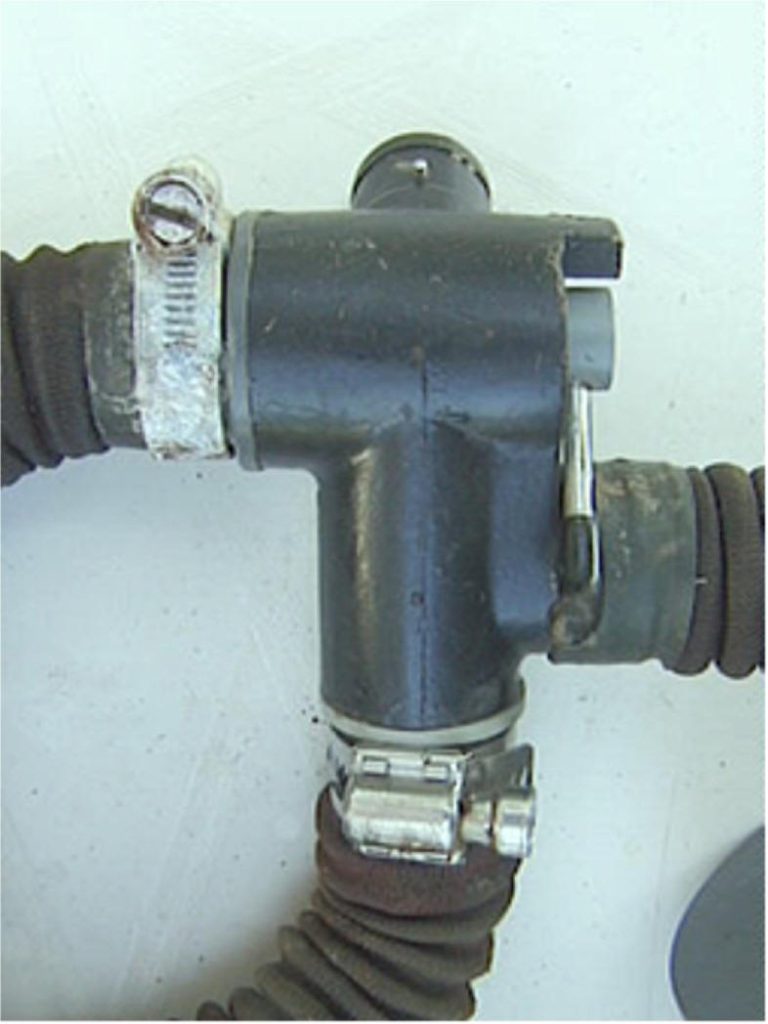
Three breathing hoses were attached to the mouthpiece. One went straight down to the counterlung which was worn on the chest. The other two went to either side over the shoulders to the inlet and outlet of the absorbent canister/electronics section which was worn on the back. Initially hoses from the old style twin hose scuba regulators were used. At Beckman we found a manufacture in L.A. who made high quality fibre reinforced hoses for the O2 breathing systems in military aircraft. The price was only a little more than the scuba hose and they could be made to order as to length in small quantities. Scuba hoses tended to start to leak after a year or two. The others are still usable after a quarter century in tropical conditions.

Hose clamps may seem mundane but are worth considering. A hose coming off with scuba is an inconvenience. With a RB it is a life threatening disaster. Initially we used the spring steel ratchet type clamps used on scuba regulators but I didn’t fully trust them and they rusted. We tried chrome plating them and found they would then break unexpectedly due to hydrogen embrittlement. In the end we went to good quality heavy duty SS worm screw type clamps. Some SS clamps have ordinary mild steel worm screws which rust, electrolyse, and break after awhile in marine use. Light weight SS clamps can also break for no apparent reason due to stress fatigue. SS is prone to this. SS fitting used in sailboat rigging are notorious for letting go at the most inopportune times.
A lot of people seem to now use the nylon ratchet type ties for clamping hoses but I wouldn’t trust these either for critical applications. Nylon is subject to cold flow under stress and after a while they become looser.
Using them as a back up next to a good SS clamp however might not be a bad idea.
The counterlung was a bag made of two pieces of plastic material electronically welded together over a 1/4″ surface around the entire perimeter about 1/2 ” in from the edge which was then sewn together wrapped in a heavy edging tape. Originally I used clear vinyl for the material.This worked well enough but later I found a lighter, more flexible, translucent fibre reinforced plastic material which was better.
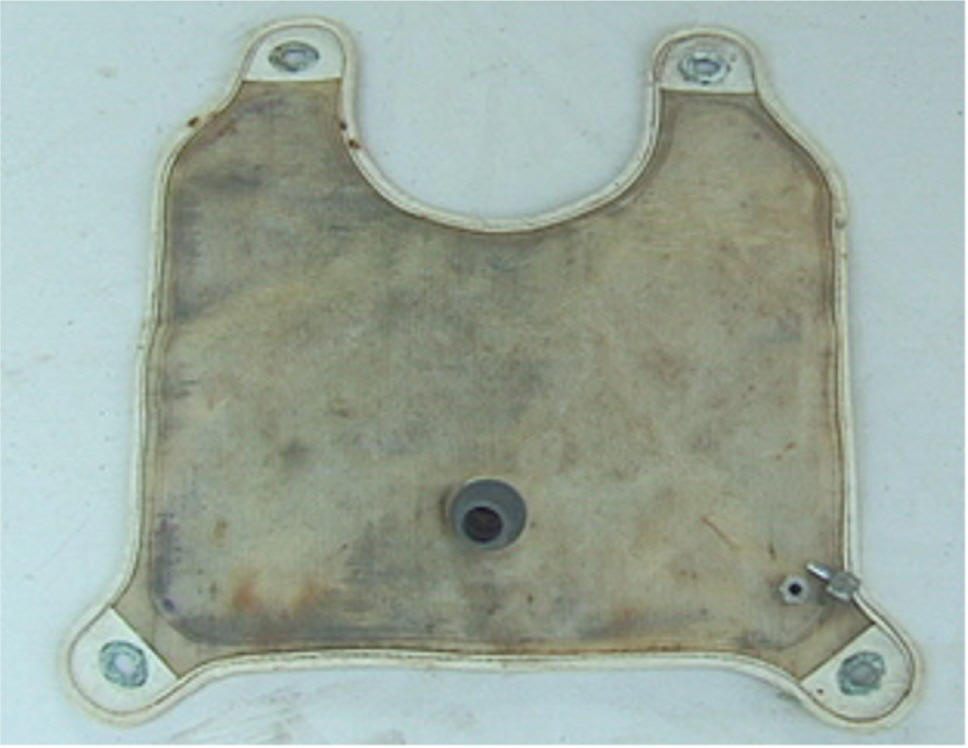
Being clear or translucent offers two advantages. It lets light in and so reduces the growth of micro-organisms. It also makes it easy to see if any water has accumulated and get rid of it before it gets to a level where it might be drawn into the absorbent canister. Places which make awnings, boat covers, etc. or those who make plastic zipper bags ,folders and the like can easily and inexpensively do this kind of work. All you need is a paper pattern of what you want. One-offs for prototyping are not expensive and with a $100 or so for a die for the welding they can pop out small quantity runs dirt cheap. Usually they also have samples and catalogues of all sorts of material to choose from. Teflon coated nylon is now available and might be very good for this application. I mention all this because some homebuilders may be interested.
The counterlung had a single hose attached about 1/3 of the way up from the bottom on the front (away from the body) side. A drain plug was at the bottom near the lower left corner. At Beckman we added an overpressure relief valve near the top. The fittings all used a flange and threaded collar type attachment similar to a kitchen sink drain. The flange incorporated a groove and o-ring in its face which ensured a firm grip and seal with the counterlung material. The fittings were machined from PVC except for the small drain fitting which was SS or chromed brass with a 1/4″ plug on a short lanyard. It was basically the same as a control gland used in underwater camera housings.
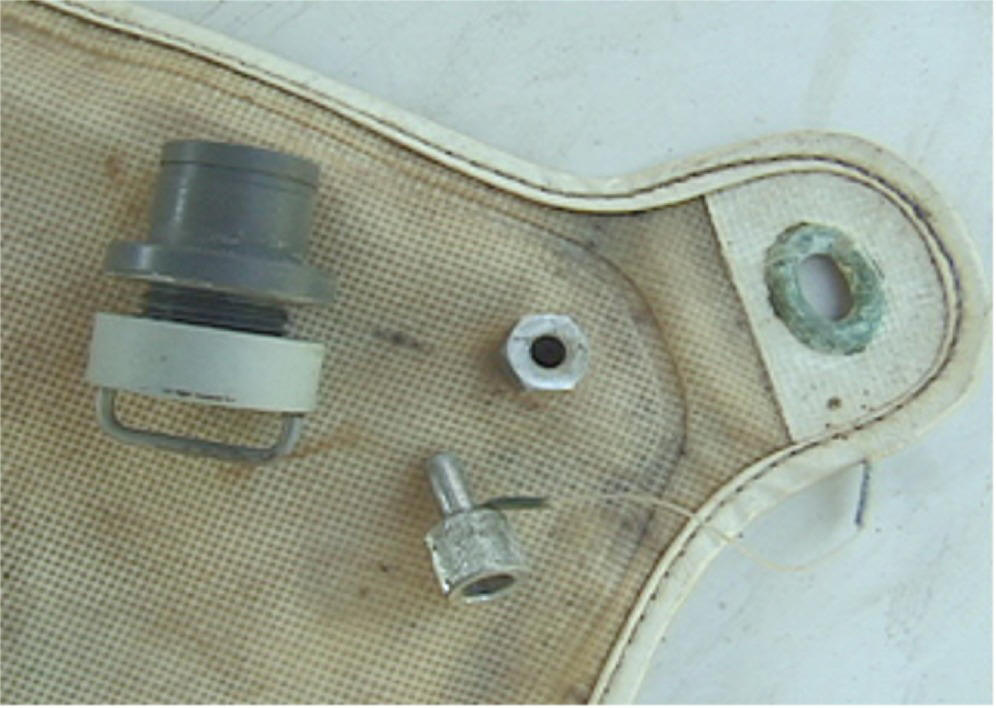
The overpressure relief valve released at somewhere around 0.75 psi. Its only practical use was the prevention of possible counterlung rupture if gas was accidentally valved in with the mouthpiece shut-off valve closed. It was introduced at the suggestion of experienced OC divers who not being used to getting rid of excess gas via the nose during ascent tried to exhale against a full counterlung and couldn’t.
The counterlung was attached by grommets at each corner which mated with twist studs
mounted on the shoulder straps at the top and on short adjustable straps paralleling the backpack waist strap on each side at the bottom. The counterlung volume we used was about 4 L.
There has been some discussion on the list recently re: the relative merits of chest mounted (resistance on exhale) Vs. back mounted (resistance on inhale) counterlungs. In an earlier post, which has been quoted in the recent discussion I opted for chest mounting as preferable because the mechanics of breathing musculature is such that the power available for exhalation is greater than that for inhalation. The counter argument is that resistance on exhale reduces the volume of exhaled gas leading to CO2 retention.
First, we need to keep in mind all this is somewhat hypothetical and in the real world both configurations have been used successfully. With sustained high level exertion where any advantage might be important (and in the continuing absence of any proper comparative testing) I would opt for the chest mount for two reasons. It’s less tiring to put a bit of extra effort into exhaling than it is into inhaling and the bottom line at the extreme for ventilation lies with how much gas you can move in and out in a given time. Given equal resistance in either direction the more powerful exhalation cycle will move the greater amount of gas. In the end, over a few breaths, expiration and inspiration must be equal. Restriction of either sets the limit so if there has to be a restriction I would rather it be on the side which can best handle it.
We sold a number of Electrolungs to commando type users. One of their prime concerns was breathing resistance in sustained hard swimming. After trying it, all gave it their thumbs up in this respect. In out of water chamber tests at 1000 FSW pressure breathing resistance during exercise was encountered. This was in the breathing circuit itself and could of course be relieved somewhat by bigger hoses, larger absorbent bed cross section, etc but as the market for that capability was effectively nil it was never pursued.
One memorable experience with the commando types took place in the Bahamas. A British Royal Marine Commando attached to the Canadian Navy flew down to join me on my vessel and try out the Electrolung. He was a big bullet headed guy, built like a fridge with a head. After a couple days instruction diving he wanted to do a long hard swim with it and as there was no one else to do it with him I ended up going along. He went for a couple of miles virtually flat out. Luckily the water was crystal clear so I managed to at least keep him in sight. When we came to the surface the bastard wasn’t even winded. He was satisfied it could do the job and just wanted a smoke. It was flat calm and the water was only about 30 feet deep so I had a skiff following us with his smokes and we could ride back.. Although I still don’t know for absolute certain whether chest or back mount is optimal I do know that chest mount is good enough. What I really do like about it is that it is easy to see if there is any water in it and easy to pull the plug, squeeze the bag, and expel it. We did have a couple of experienced OC divers, new to the Electrolung, let water leak in around their mouths until it was gurgling away with each breath. They continued until they had largely flooded the absorbent canister and eventually got a mouthful of absorbent cocktail. They were quite irate about all this and swore it was the fault of the Electrolung. This kind of thing is a recurrent problem with RBs. Experienced OC divers have habits which don’t go with RBs. They also tend to think of themselves as expert divers rather than as novice RB users. As a result they often don’t really listen and take advice well and tend to blame the device if anything is not right rather than realising that they have to learn to use it right.
The actual breathing circuit for the Electrolung was: Exhale directly to counterlung via bottom mouthpiece hose. Inhale draws gas from counterlung back out the same hose into left mouthpiece hose thence to the bottom of the canister via a central tube inside it. At the bottom the gas emerges into a plenum which distributes it over the inlet surface of the absorbent column. After passing through the absorbent it emerges at the top into the chamber where the sensors and solenoid are located. From here it continues via the right mouthpiece hose into the mouthpiece itself.
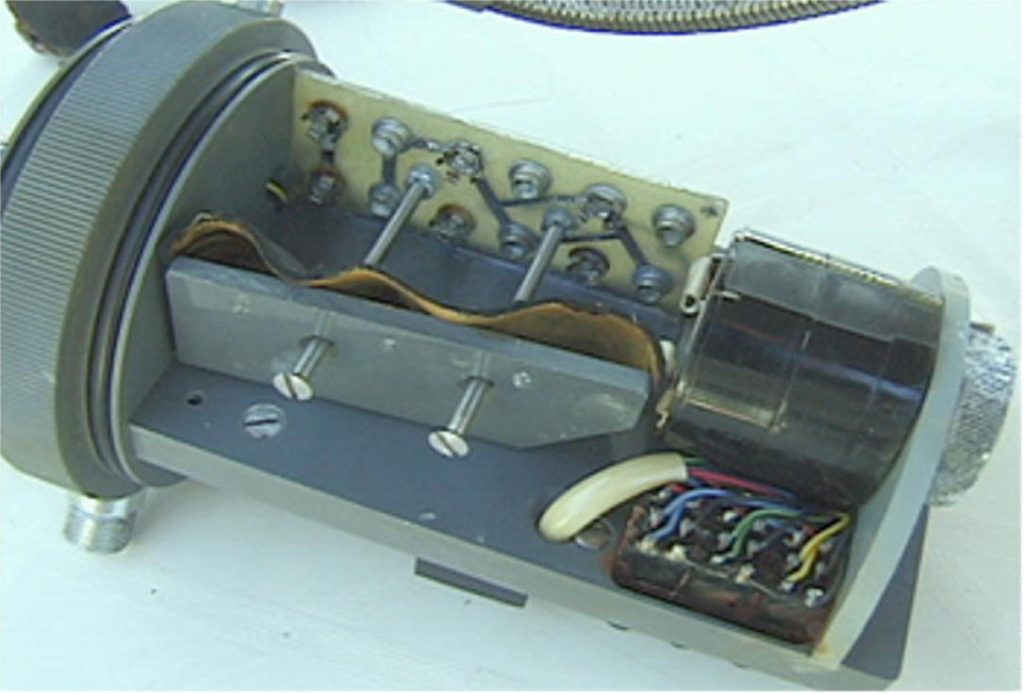
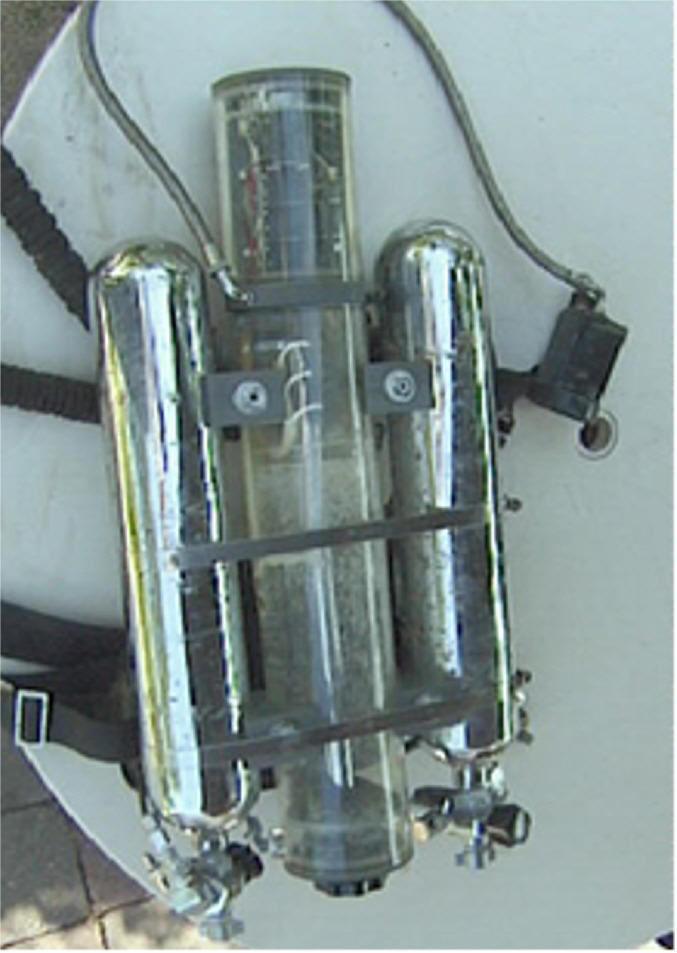
5. Absorbent canister and electronics housing
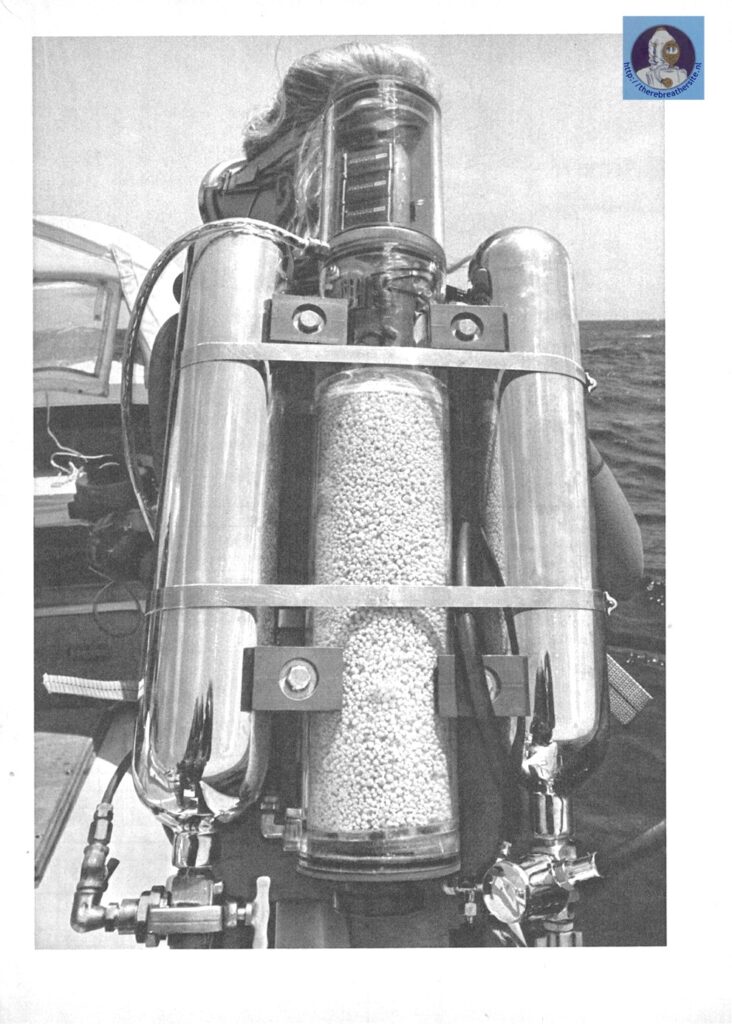
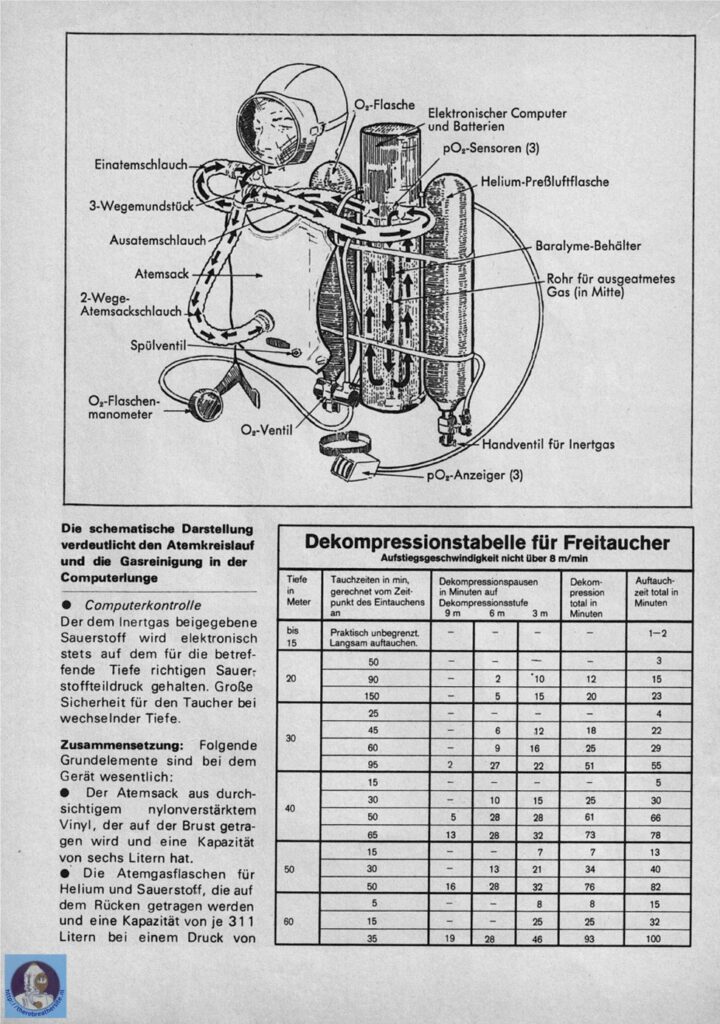
In the Electrolung the CO2 absorbent and electronics were housed in a transparent acrylic (Plexiglas) cylinder which together with the gas bottles was worn as a backpack. This cylinder was 24″ long x 4″ I.D. with 1/4″ thick walls. It was divided into two pieces. An 18″ section contained the absorbent bed with a 4″ space at the top which accommodated the sensors and O2 solenoid. A 6″ section at the top contained the electronics. A small knob on the electronics section operated a double throw, center off, switch controlling power to the electronics via either set of batteries. This was reachable behind the head if development of your biceps didn’t prevent it.
Actually geeks do make the best RB divers anyway but out of respect for the temporary cease fire I will refrain from further comment along that line.
The ends were sealed by 1/2″ thick PVC O-ring sealed plug type closures. A thick PVC double plug type bulkhead joined and partitioned off the electronics section from the absorbent section. The entire assembly was held rigidly together by a central 1/4 SS tie rod running from top to bottom. It had a large external knob at the bottom for tightening and loosening which was effected by screwing into a metal socket on the top closure. O-ring seals were used to seal the tie rod penetration of the bottom closure, the metal tie rod socket on the top closure and where the tie rod passed through the electronics bulkhead. This last was only to prevent capillary action from possibly drawing any water from the absorbent section into the electronics section.
The electronics section atmosphere was vented to the absorbent section through a small canister of silica gel via a separate bulkhead penetration and a small standpipe as mentioned earlier in the description of the Electronics.
The O-ring seals for the end closures and the join at the electronics bulkhead were all radial type seals which automatically effect a proper seal when they are plugged into the cylinder. Sealing is effectively independent of how tightly or loosely things are clamped together. With this type of seal and operating at ambient pressure the possibility of leakage around a seal is vanishingly small.
A brief aside for homebuilders. Although O-rings are marvellously effective seals and are universally used in all types of underwater equipment it is remarkable how often manufactures use them improperly. O-ring suppliers have various free pamphlets and data sheets on proper application of O-rings which includes data on the correct shape and tolerances for the grooves which accommodate them. It is well worth while to avail yourself of this information.

Common errors in O-ring usage which you often see in marine equipment are: Grooves too deep resulting in inadequate sealing pressure. Too shallow, resulting in too much compression of the seal leading eventually to fine radial cracking and consequent leaking. Too narrow, which interferes with proper compression and sealing at low compression, and distortion toward a square cross section under full compression, this leading again to radial cracking of the seal. Finally, and most ignorant of all, is the use of rounded U-shaped grooves which defeats the whole principle and advantages of the circular cross section and turns it effectively into a flat gasket.
The absorbent canister portion of the cylinder was a 12″ section toward the bottom defined by two 1/4″ thick acrylic or PVC internal bulkheads perforated with an array of holes. Plastic screen was used to keep the absorbent from falling through the holes. The top bulkhead was fixed in place. The bottom one was free to move but held in place against the absorbent column by a large spring. This served to keep the absorbent compacted without channelling despite any minor settling of the granules after filling the canister.
We used Barylyme as an absorbent. This is a National Cylinder Gas trade name for Barium Hydroxide. It was widely used in hospitals and came in hermetically sealed one quart cartons of the type used for milk. The Electrolung canister held two cartons which would be sufficient for six hours of moderate activity. We changed them after four hours. Barylyme came with a colour indicator, pink when fresh, blue when expired. It is less caustic than soda lime and worked well for us.
As described earlier gas was drawn from the counterlung to the space at the bottom of the canister down a central 1″ ID tube leading from the inlet hose attachment down to the bottom end of the canister section. From there it passed back up through the absorbent into the sensor/solenoid chamber and on via the inhale hose to the mouthpiece.

The gas supply cylinders were mounted on either side of the absorbent canister/electronics cylinder using spacer blocks conforming to the curvature of the respective cylinders. The three cylinders were secured rigidly in place by two large SS hose clamps. One was adequate for the purpose so there was backup in the event of one breaking. The spacer blocks also served as attachment points for the harness which was a U.S. Divers one of the type widely used before BC’s took over this function. There was a wide vinyl strap for each shoulder plus a waist strap. The overall configuration of the Electrolung backpack was similar in many respects to that of the small triple tank OC rigs favoured by the French at that time. It rode well on the back and was quite comfortable. All up weight of the Electrolung was about 30 pounds.
Some people expressed concern about the use of acrylic fearing the possibility of breakage. This is one of those things which is more apparent than real. In this case it is protected on one face by the wearers body, on either side by steel gas cylinders and at top and bottom by thick PVC ends. The only real exposure to any possible impact was the curved surface of a 4 1/2′ OD 1/4 thick cylinder which would be extremely hard to break. We did look at using polycarbonate (Lexan) which is literally bullet proof but found it crazed and crumbled into small pieces when exposed to hydroxides. It would of course be easy to make the whole thing of PVC but I feel the advantage in being able to see condensation, water, and the condition of your absorbent more than outweighs the non-problem of smashing heavily into things while going backwards. Beckman offered a fibreglass fairing for those who might be concerned with this but of course some then bought it because they liked the way it looked and others did so because they felt that if it was offered they probably should get the complete set up.
A final aside for homebuilders. The Electrolung was really a homebuilt which became a commercial product. It was built entirely with a drill press, lathe, and jigsaw; plus a bench grinder for shaping and sharpening lathe tools as the only power tools. For anyone attempting to build any kind of underwater equipment a metal lathe is really a must. With one you can easily make all kinds of cylindrical housings, O-ring sealed fittings, ports and closures, and any kind of threaded fitting you might need. A small lathe with a five or six inch swing over the bed will enable you to make housings and ports up to 10-12″ in diameter. Good quality Chinese made lathes suitable for this kind of work are now available for about U.S. $ 1500. For another few hundred dollars you can also get a milling attachment as well which is a useful addition.
Teaching yourself how to use it is not hard. Good text books which cover this kind of machine tool work are readily available and easy to follow.
The Electrolung patent is online at
http://www.patents.ibm.com/details?patent_number=3727626
The online material is a summary but you can order the full patent there. It contains much more detail including various drawings.
6. Final, reflections and speculations
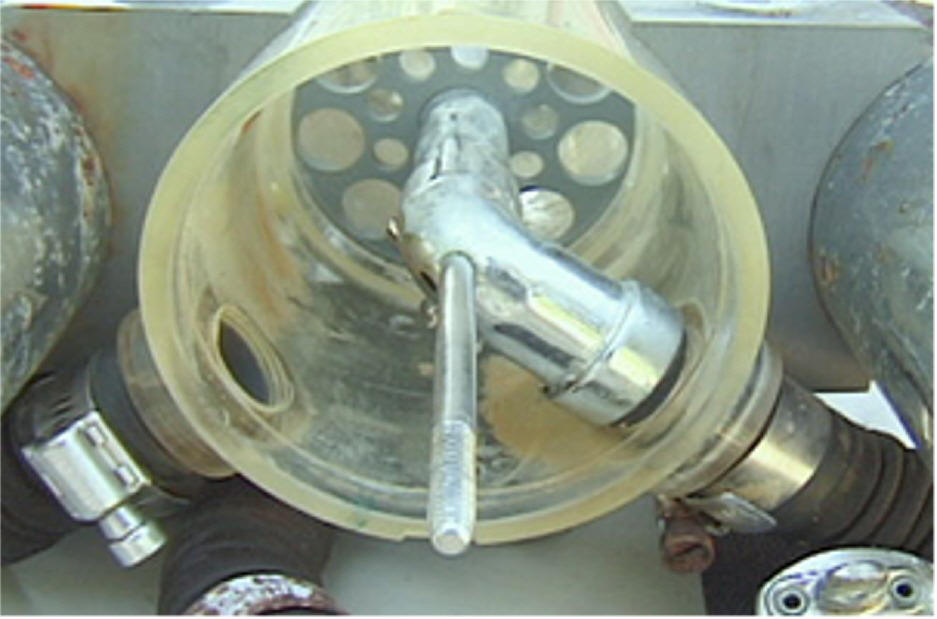
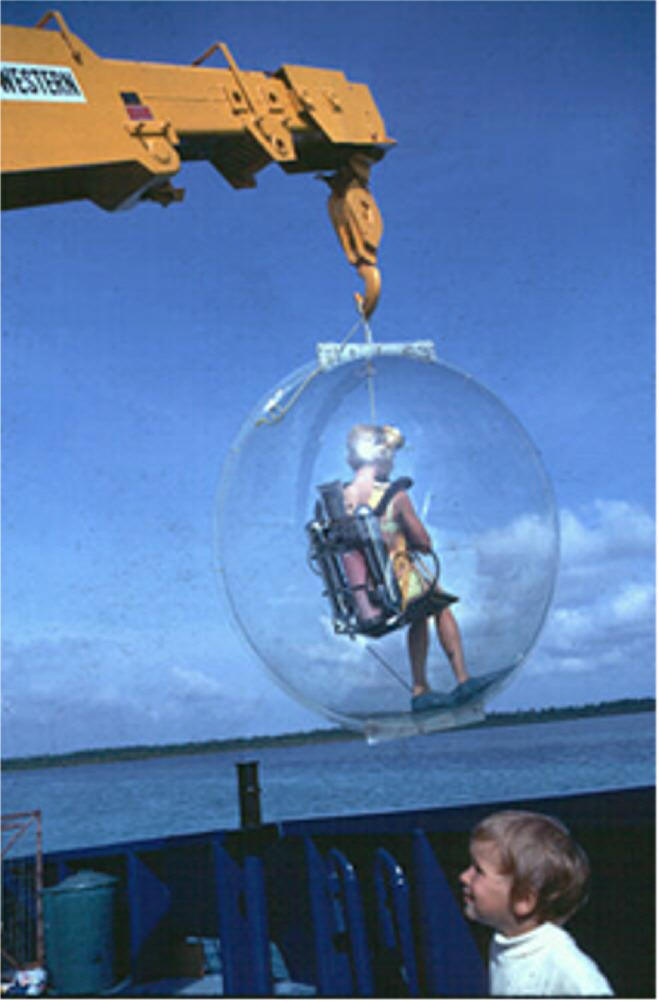
Development of the Electrolung came about through the chance meeting of John Kanwisher and I aboard Ed Link’s diving research vessel in the Bahamas in early 1968. Ed was trying out his new diver lock-out submarine Deep Diver and had invited along several researchers with relevant interests. I was there to do some deep biological collecting and John was there to do heart rate/respiration measurements on divers using some new acoustical telemetry equipment he had developed.

Lock-out dives from Deep Diver were done using hose fed OC Kirby Morgan helmets. Gas for this purpose and to pressurise the lock-out chamber was supplied from a large high pressure sphere carried by the sub. The large amount of gas required for a single dive severely limited the number of dives which could be made and involved substantial cost and logistic considerations. The need for more efficient utilisation of gas was clearly apparent.
It turned out that John and I had both been considering the feasibility of a mixed gas CCRB using electronic sensors to control PPO2. We both knew in general terms what was needed but John wasn’t a diver or a machinist and I didn’t know that much about electronics. However, I had been diving for 15 years and had built a wide range of underwater equipment and John, in addition to being a physiologist, had invented the first polariographic oxygen sensor and held a dual appointment at Woods Hole Oceanographic Institute and MIT where he lectured on electronic instrument design.
When we returned to our homes John started putting together the sensors and control circuit and I started getting together the hardware and machining all of the necessary bits. Six weeks later we both had our respective parts together. John sent me the board and sensors, I installed them and it worked. The overall configuration and design was basically as described but there were, of course numerous details to clean up. The electronics for example were wire connected on a breadboard and the solenoid valve I had hand made and actuated with a solenoid scavenged from a battery operated coo-coo clock.
Although the prototype was put together quite quickly it was far from a “first thing which comes to mind” effort. Quite a few years experience and thought had led up to it so that when actual construction was began we both knew pretty clearly what needed to be done and how to do it. Later at Beckman I had the opportunity of working with a whole group of specialists on improving the same device. The outcome was some tidying up of details
but no fundamental improvement. The biggest problem was to prevent the creation of problems which didn’t previously exist but could be introduced through changes made by specialists who were unaware of consequences outside of the narrow area of their expertise. The experience gave me a real appreciation of both the power and the limitations of specialist expertise and the importance of systems analysis in co-ordinating and integrating the input of specialists.
Although development of the Electrolung was interesting, even exciting, in itself it was just an interesting incident in a bigger, far more interesting and significant picture. Like most historical events, I suppose, what was happening didn’t appear to the participants at the time so remarkable as it later does in the broader perspective of hindsight. The larger perspective on what is taking place right now tends to be somewhat obscured by the ordinary events of living. Except for rare instances whatever we are doing, however interesting and exciting it may be, tends to still feel like life, not like history in the making.
In retrospect however, I have come to realise that from the mid 1950 through the mid 70’s something really remarkable was taking place in diving. During that period diving grew from the obsession of a small group of generally impecunious young people mostly in FL, CA, France, and Italy to a global industry catering to well-to-do hobbyists. Remote tropical islands all over the world began to sprout airports and dive operations and diving
became strongly oriented to travel to exotic locations. Though all this was in itself remarkable something truly unique was at the real heart of what was happening.
For the first time in history humans could freely enter, explore and personally experience the oldest, richest, most beautiful and exotic communities in nature, tropical coral reefs. Coral reefs are truly remarkable places. Nowhere else can one experience such an abundance and diversity of life. Nowhere else is it so colourful, exotic and so easily experienced at close range.
Diving on a reef is like a trip in a time machine to a time before humans existed and nature ruled in primeval pristine abundance. Fossils of many reef creatures from as much as 60 million years ago are essentially the same as those on reefs now. In fact some Pacific reefs have existed as reefs for that period of time.
For a biologist, being among the first to dive on reefs was an extraordinary experience. In a way it was a bit like landing on another planet. On nearly every dive you were going where no human had ever been before. The discovery of phenomena of life and strange and beautiful creatures whose existence we never even suspected was an everyday occurrence. At the time this kind of experience was so commonplace, tropic seas so vast and remote, and so few people were doing it, that it began to seem as if this was just the way things were and this kind of experience would continue on indefinitely.
Already however, this era has become history. Although there are vast amounts still to be discovered about the details and inner workings of reefs, still undiscovered species are getting harder and harder to find and remote locations are becoming less and less remote. The experience of being among the first to explore the richest realm of nature has come and gone, not to be repeated.
On reefs, one niche still remains. Actually it is a really big one. The zone below 200 feet, down to the deepest limits of what you might call part of the reef community at about 600 feet, is still largely unexplored. Although it is not so rich in life as the shallower regions it is still rich in life and is an area about which we know very little.
As far as I am aware the only person on the planet regularly exploring this zone is Rich Pyle. What he is doing is really exceptional and he is doing it essentially on his own. While discussion on the Rebreather List is largely restricted to the technology and physiology as an end in itself what Rich is doing goes well beyond this. As well as making more deep free dives than anyone ever has before he is coming back with knowledge and specimens from every dive. What he is doing is a permanent contribution to knowledge which will stand long after any of today’s diving records are broken and
forgotten. I have never met him personally and am commenting only out of recognition of something exceptional.
Over the past 25 or thirty years advances in diving technology have been almost entirely small and incremental. The only real exception I can think of is the development of dive computers. It appears we are up against the realities of human physiology. With every increase in depth and bottom time the cost, complexity , effort, and risk increases exponentially while the return of useful achievement remains more or less linearly related to bottom time.
The future it seems lies in other directions, especially robotics. Here the advances have been impressive and future development promises to become even more so. Already we are at a point where more and more functions previously requiring a diver can be effectively carried out by ROV’s . It is not hard to foresee that in a few years most of what we do at great effort and risk by diving can and will be done by nerds at consoles. In fact, right now in the Gulf of Mexico Shell and BP are drilling in 5000 to 6000 FSW and all work at the wellhead is done by ROV’S.
If you find this kind of scenario uncomfortable, don’t let it worry you. Long term prediction, no matter how well reasoned and seemingly inescapable, has a way of almost always being wrong. So much so that I have often wondered if beneath the facade of Newtonian certainty of our universe , somewhere in the iffy probabilistic realm of quantum mechanics, there is not a relationship which dictates that the very act of prediction sets in motion forces which generate a different outcome. So if you don’t agree with my prediction, the good news is that I may well have voided it by predicting it.
Fortunately, the real outcome is usually even more interesting than any of the predictions.
Walter Starck
Below the development of the sensor and the patents of the Elektrolung


These leaflets made available thanks to Sharon Readey!
Later another set of unique pictures was send to me to be added to this page:



This manual was given to me by David Dekker, for which I am very grateful. David’s fantastic website can be found here
This manual was given to me by David Dekker, for which I am very grateful. David’s fantastic website can be found here
After calling for a more readable copy, I received both manual 1 and 2 from Sharon Readey. Later I also found this German article in my own archives. Lots of reading pleasure! Thank you Sharon and David for your contribution! Much appreciated!



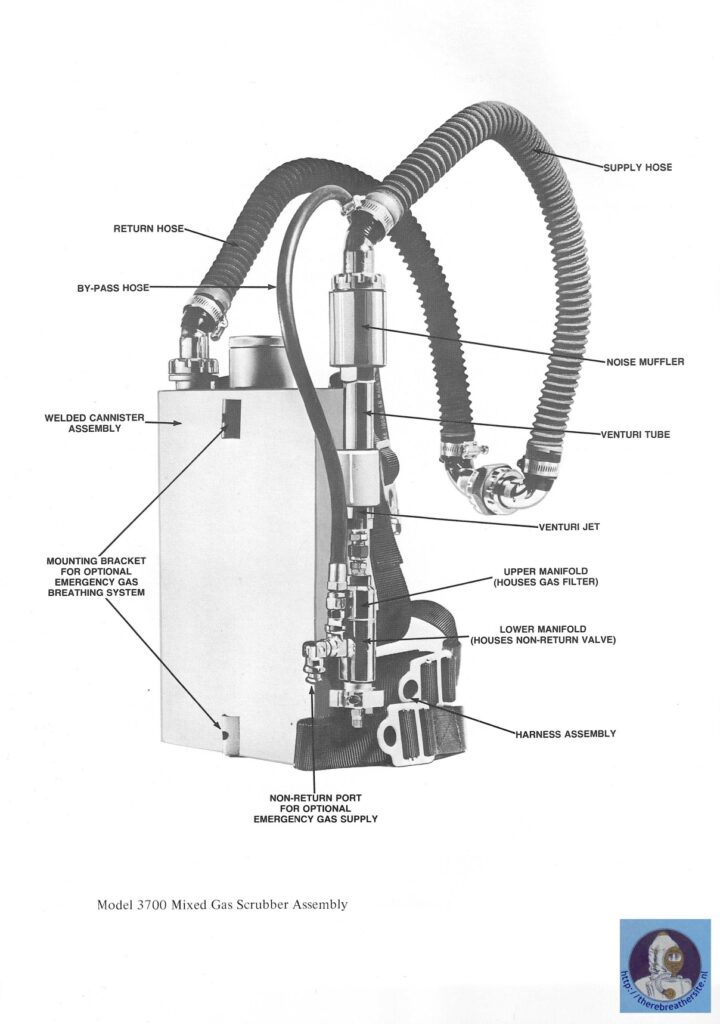
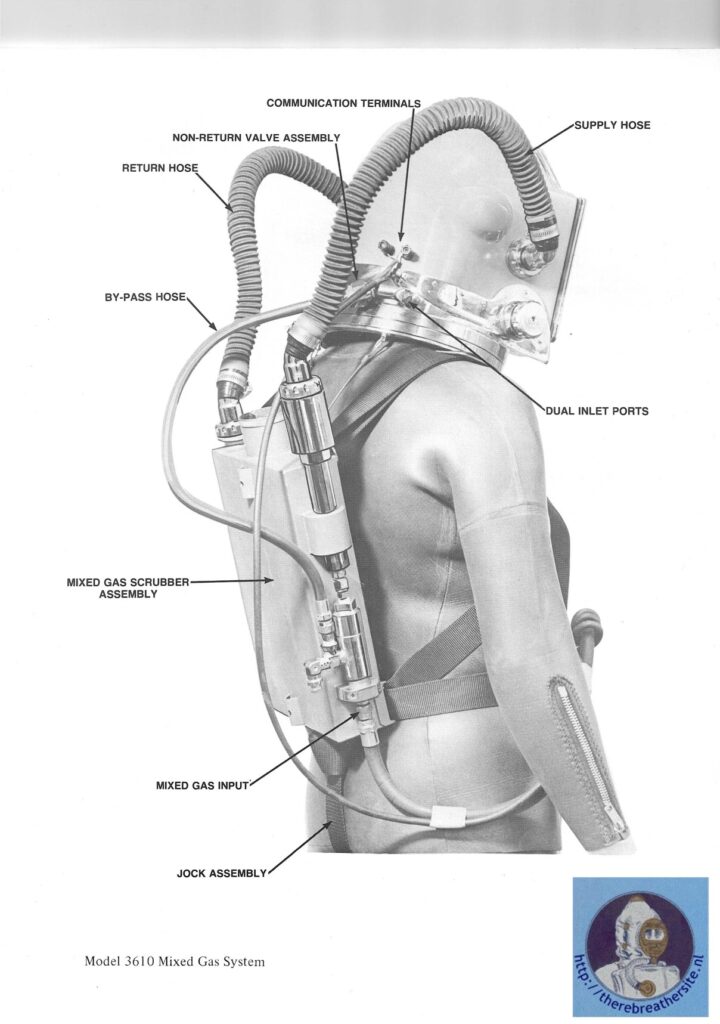
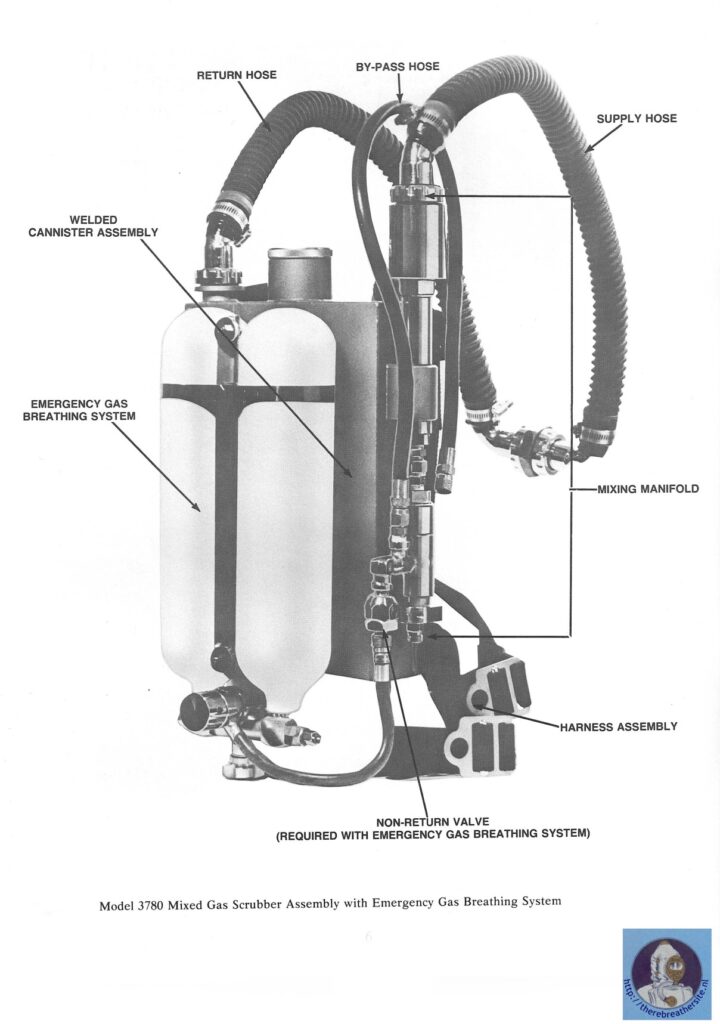
Around the same time the Electrolung was introduced, Divex came out with a Mix-Gas bailout system and diving system. It bears a striking resemblance to Elektrolung. In the set where the cylinders come out together on a bridge is a first stage. So it looks like this configuration was a semi-closed system with a single gas.

Therebreathersite was founded by Jan Willem Bech in 1999. After a diving career of many years, he decided to start technical diving in 1999. He immediately noticed that at that time there was almost no website that contained the history of closed breathing systems. The start for the website led to a huge collection that offered about 1,300 pages of information until 2019. In 2019, a fresh start was made with the website now freely available online for everyone. Therebreathersite is a source of information for divers, researchers, technicians and students. I hope you enjoy browsing the content!